| | ||
| |
| | ||
| |
|
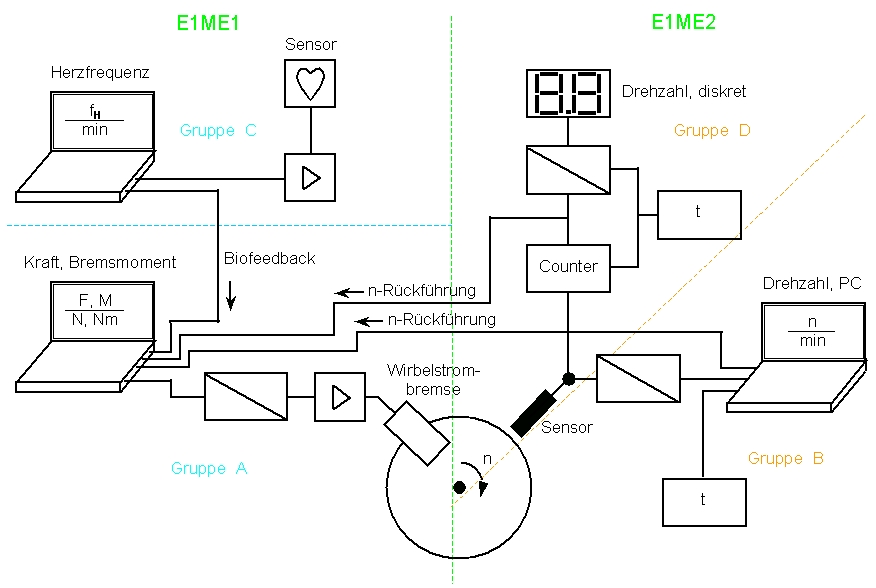
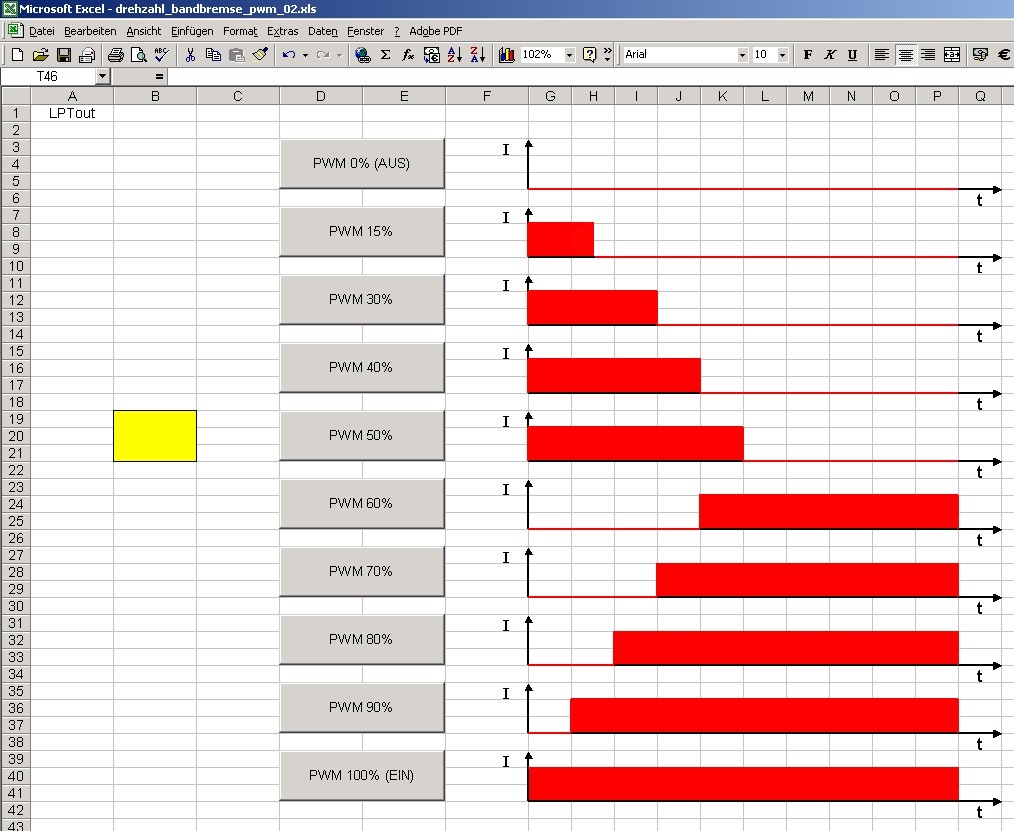
(1) Aufträge (2) Blockschaltbild (3) Verlauf, Aufgaben und Lösungen (4) Schaltpläne, Programme (5) Verdrahtung (6) Stückliste (7) Projektplan (8) Lernziele (9) Gruppenbildung (10) Datenblätter (11) Erweiterungen (12) Programme (13) Presse |  |
|
 |
 |
|
|
|
 |
 |
|
|
|
 |
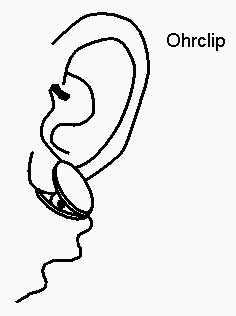 |
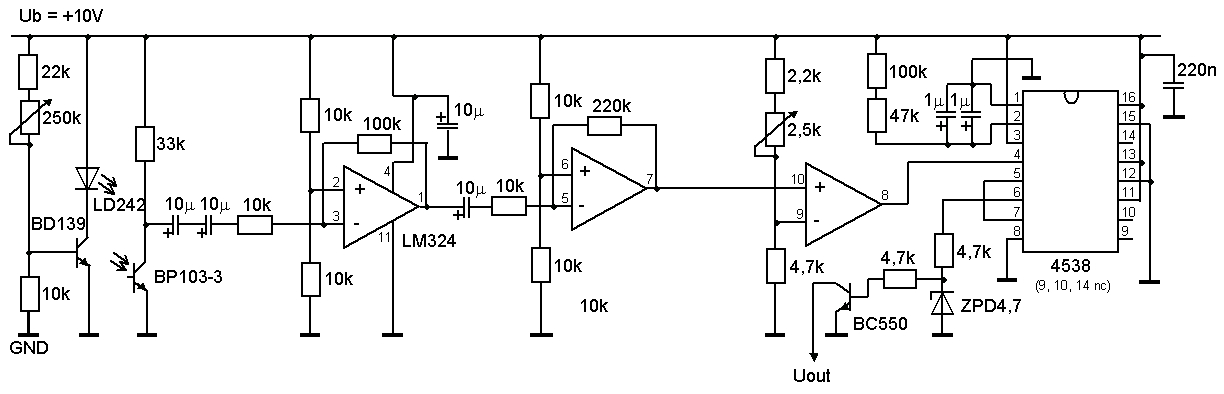

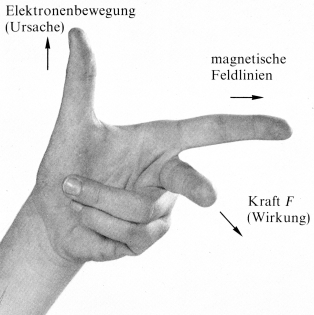
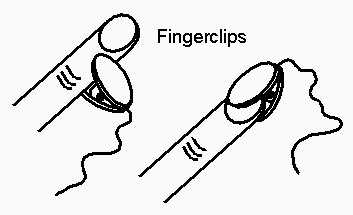
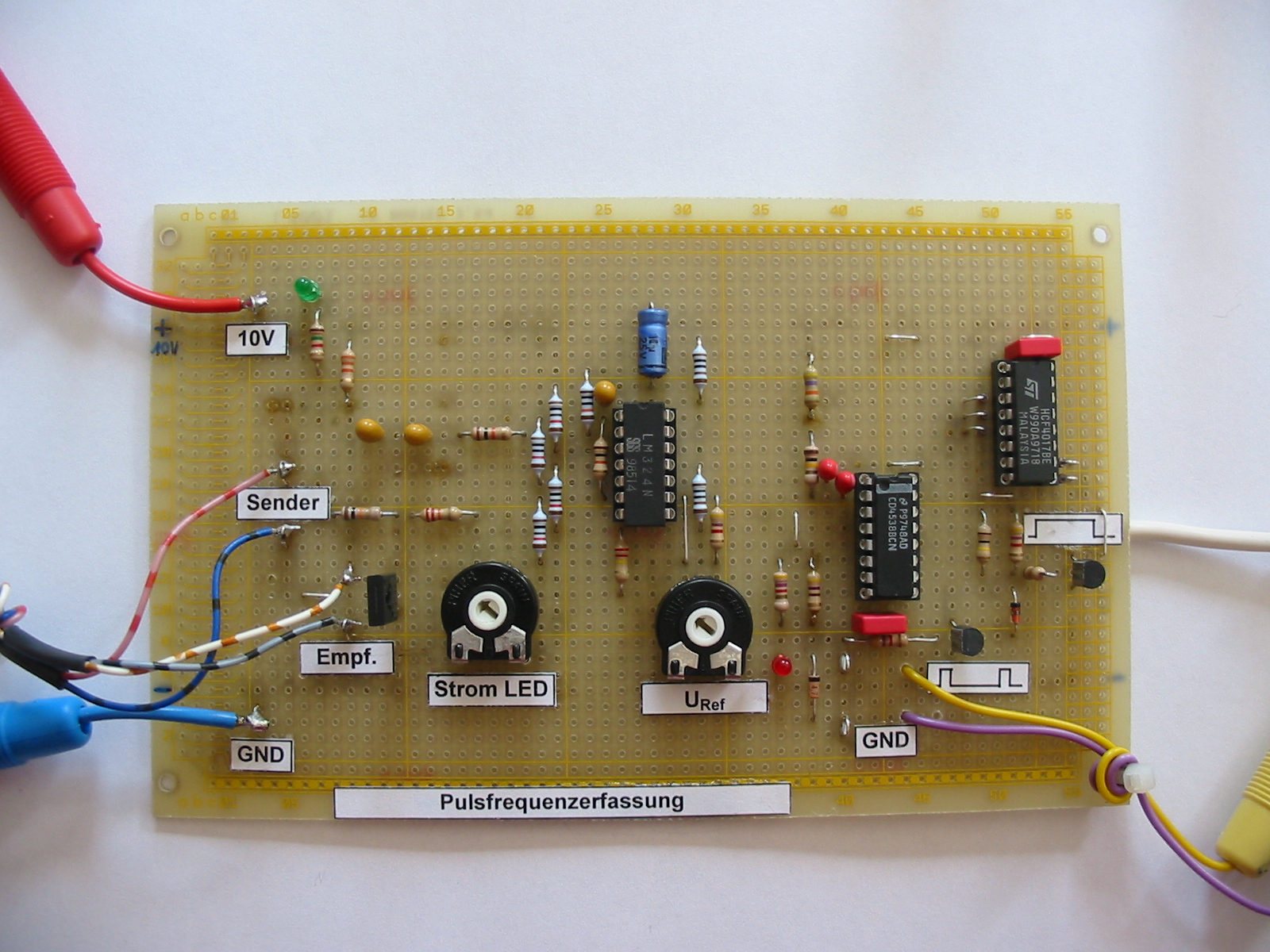
Der Strom (1uA ... 85mA) durch die IR-LED (LD242, s.Datenblätter) wird über den Widerstand der Collector-Emitterstrecke des Transistors (BD139, Leistungstyp, s.Datenblätter) gesteuert. Dieser Collectorstrom IC wird durch das Gleichstromverhältnis B zwischen Collectorstrom und Basisstrom B=IC/IB bestimmt. Dazu wird ein gewünschter IB durch den Spannungsteiler bzw. dem Poti an der Basis eingestellt. Je nachdem, wo der Puls gemessen wird, am Finger oder Ohrläppchen, zeigen sich verschiedene Transmissionscharakteristiken für das IR-Licht, die eine solche Steuerung notwendig machen. |
|
Das IR-Licht gelangt über Transmission durch oder Reflexion an den Blutgefäßen zur helligkeitsgesteuerten Basis des Phototransistors (BP103-3, s.Datenblätter). Die IR-LED strahlt mit ca. 950nm Wellenlänge, der Transistor ist um diese Wellenlänge hinreichend empfindlich, um einen photostromgesteuerten Collectorstrom fließen zu lassen. Der Transistor ist in Emitterschaltung für hohe Spannungsverstärkung und trägt einen Gleichspannungsanteil. Dieser Offset wäre für die weiter folgende Verstärkung störend, so dass nun Stufe 3.3 aktiv wird. |
|
Zur Gleichspannungsentkopplung sind zwei gepolte Kondensatoren (Tantal-C) in Reihe geschalten, die mit ihrer Kapazität von zusammen 5uF den Offset abblocken und nur die reine Wechselspannung, die aus der Helligkeitsänderung des Phototransistors entsteht, passieren lassen. Die reine Wechselspannung hat hier einen Wert von 150mV. |
|
Über den Eingangswiderstand 10kOhm gelangt das Signal zum Operationsverstärker (LM324, s.Datenblätter). Der OP ist bestrebt, eine Spannungsdifferenz an seinen Eingängen auf 0V auszuregeln. Da das Potenzial am nichtinvertierenden (+) Eingang fest auf 5V, halbe Betriebsspannung, liegt, erscheinen zunächst 5V am Ausgang, Pin 1, des OPs. Diese Spannung kann zur Ausregelung aber nur durch den 100kOhm Rückkoppelwiderstand "erschwert" an den invertierenden Eingang gelangen, so dass der OP versucht, seine Ausgangsspannung so hoch zu treiben, dass das "100kOhm-Hindernis" überwunden wird und 5V am (-)Eingang anliegen. Dies ist das Wesen der Spannungsverstärkung eines OPs, dessen Verstärkungsfaktor sich zu -V=RRückkopplung/REingang berechnet. |
|
Bedingt durch den OP mit seiner unsymmetrischen Versorgungsspannung (5V/GND) trägt das um den Faktor -10 (Praxis: -5,5) verstärkte Signal wiederum einen Offset, der vom Auskoppelkondensator 10uF eliminiert wird. Die reine Wechselspannung von ca. 800mV gelangt nun in die zweite OP-Verstärkerstufe. |
|
Die zweite OP-Stufe ist auch als invertierender Verstärker geschaltet, dessen (-)Eingang wiederum fest auf 5V liegt. In dieser Widerstandsbeschaltung verstärkt der OP theoretisch um den Faktor V=-22. Der zweite Effekt ist, dass die ursprüngliche Signalform, die am Eingang der ersten OP-Stufe anlag, wieder erreicht ist. |
|
Der dritte der vier OPs im IC LM324 ist als Komparator geschaltet, d.h. ein eintreffendes Signal an Pin10, (+)Eingang, wird mit der Referenzspannung am (-)Eingang verglichen. Ist die Spannung am (+)Eingang höher als die am (-)Eingang, so schaltet der OP-Ausgang auf maximale Ausgangsspannung, d.h. Versorgungsspannung. Dies ist auch wieder ein Regelereffekt, in dem der OP versucht, seine Eingangsspannungsdifferenz auf 0V auszuregeln. Da das "Hindernis" der Ausgangsspannung für die Rückkopplung an den Eingang jedoch unendlich groß ist (keine Leitung bzw. R zwischen Ausgang und Eingang) treibt der OP seine Ausgangsspannung in maximale Höhe. Die Referenzspannung am (-)Eingang kann über das Poti zwischen (5,1...7,0)V eingestellt werden. Der typisch eingestellte Wert ist 6,5V. | |
(3.8) |
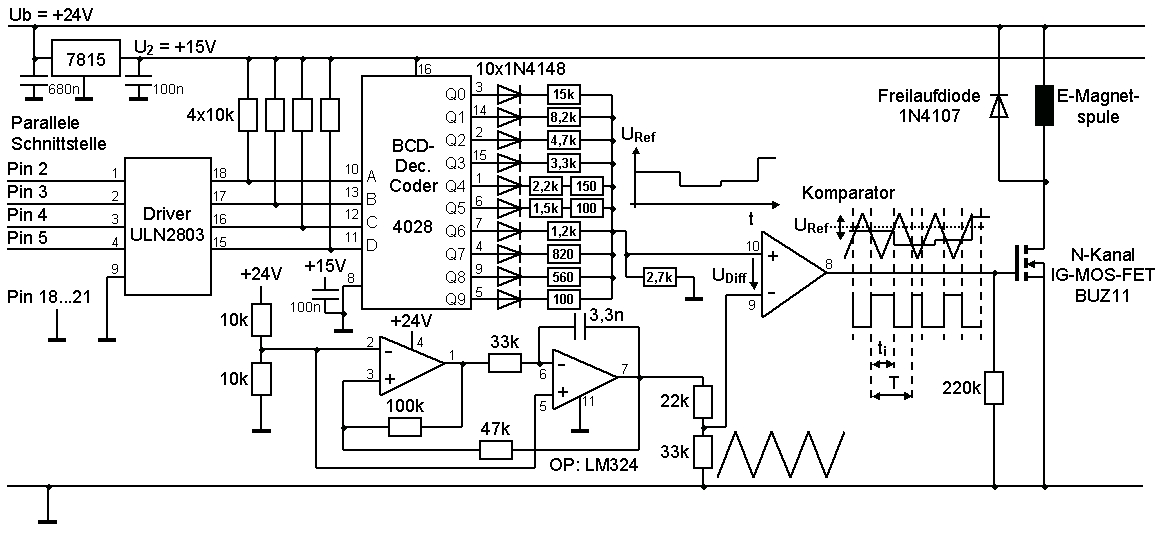
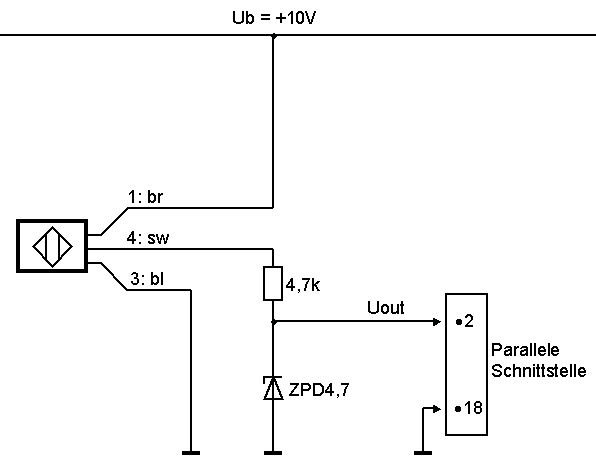
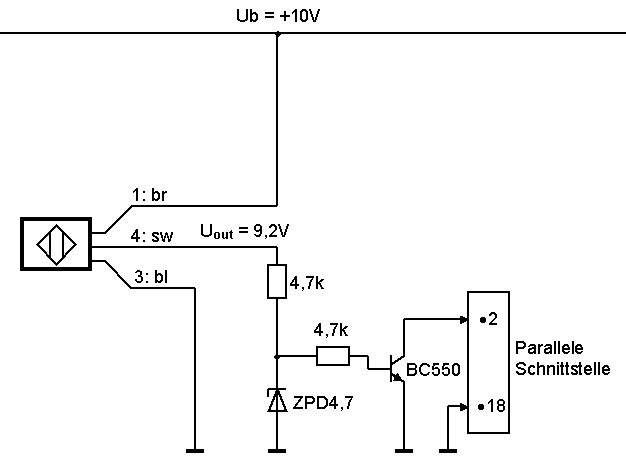
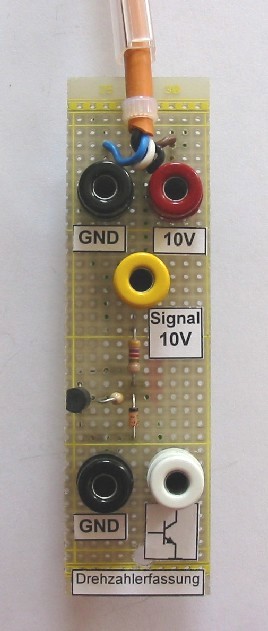
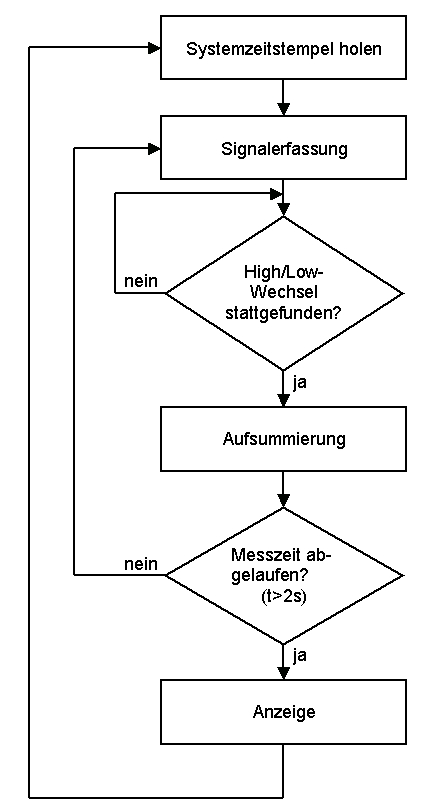
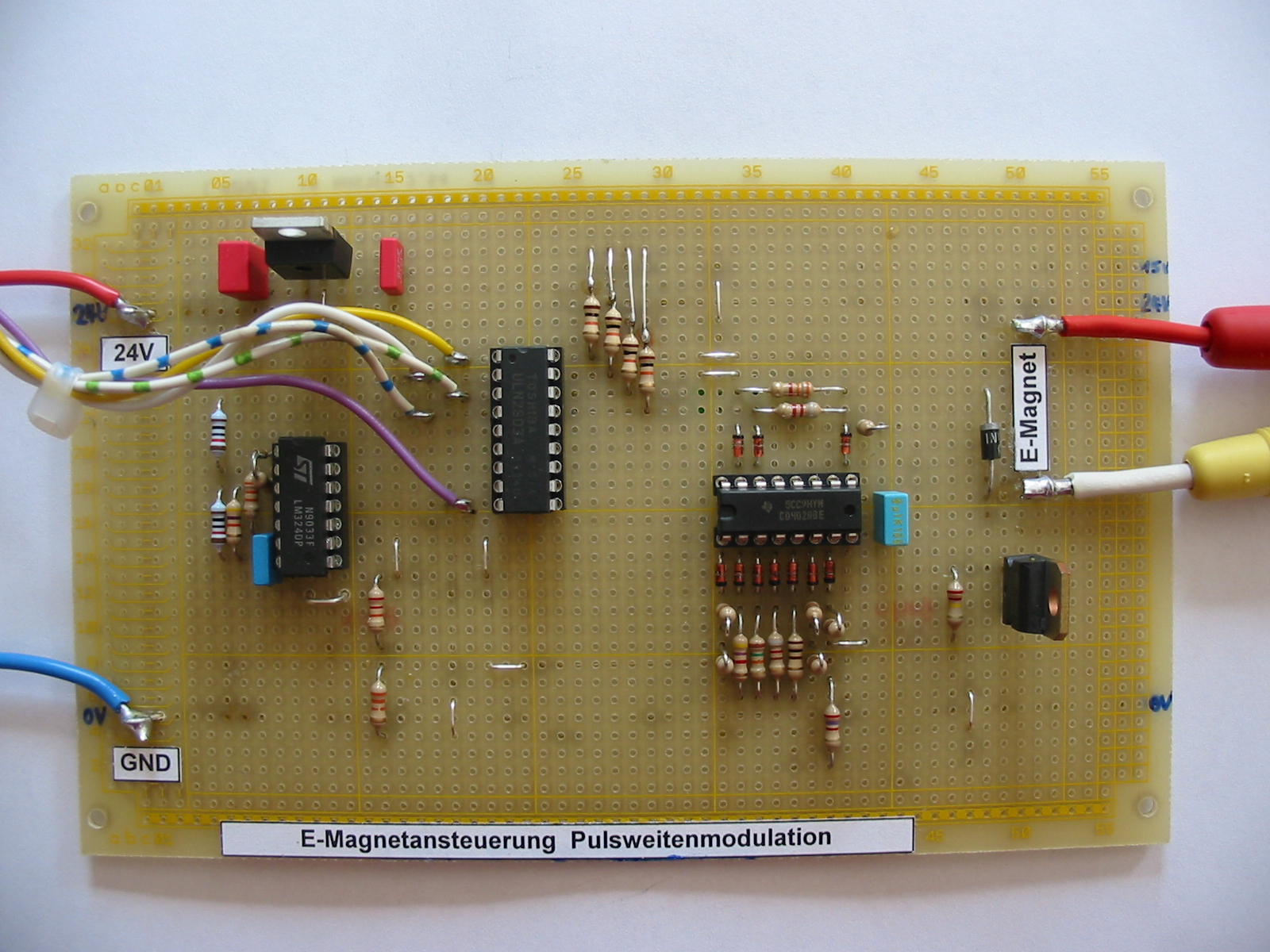
Die folgende Baugruppe bereitet das sehr kurze Signal auf, damit ein angeschlossener PC zur Datenaufnahme das Signal auch korrekt erfassen kann. Sie besteht aus einem Monoflop mit nachgeschaltetem Spannungsbegrenzer. Das Monoflop-IC (4538, s.Datenblätter) ist als nicht-retriggerbares Zeitglied mit einer Impulszeit von t=280ms beschaltet. Die Impulszeit lässt sich in Näherung aus den angeschlossenen Bauteilen berechnen: t=(100kOhm+47kOhm)x(2x1uF)=294ms. Am Ausgang Pin 6 steht dieser Impuls mit 10V an. Zu beachten ist, dass nicht verwendete Pins des ICs auf definierte Zustände nach Datenblatt gelegt werden. Damit der Eingangspegel für die parallele Schnittstelle von max.5V eingehalten wird, ist eine Z-Diode 4,7V eingesetzt. Der Vorwiderstand berechnet sich aus dem minimalen Z-Strom (=10% IZmax, s.Datenblatt) und der am Widerstand abfallenden Spannung. (3.8) Dies funktioniert aber nur bei älteren parallelen Schnittstellen, bei neuen muss, obwohl die Pins auf Eingang geschaltet sind, der anstehende Highpegel auf GND gezogen werden. Eine einfache und geschickte Schaltung dazu ist der Transistor in "open collector"-Schaltung, dessen Basis über den Vorwiderstand 4,7kOhm angesteuert und die Strecke Collector-Emitter niederohmig wird. Die parallele Schnittstelle reagiert also auf einen Wechsel von High nach Low. Ein Programm zur Pulsfrequenzanzeige mit Refreshzeit 4s (Anzeigenaktualisierung) ist unter "12. Programme s.u.". Der 220nF-Kondensator dient dazu, im Schaltaugenblick genügend Strom für die korrekte IC-Funktion zu liefern. Lange Stromzuleitungen vom Netztgerät haben bei steilen Signalflanken, wie sie beim Schalten des ICs entstehen, einen merklichen induktiven Charakter, der Strom nur allmählich ansteigen lässt. |

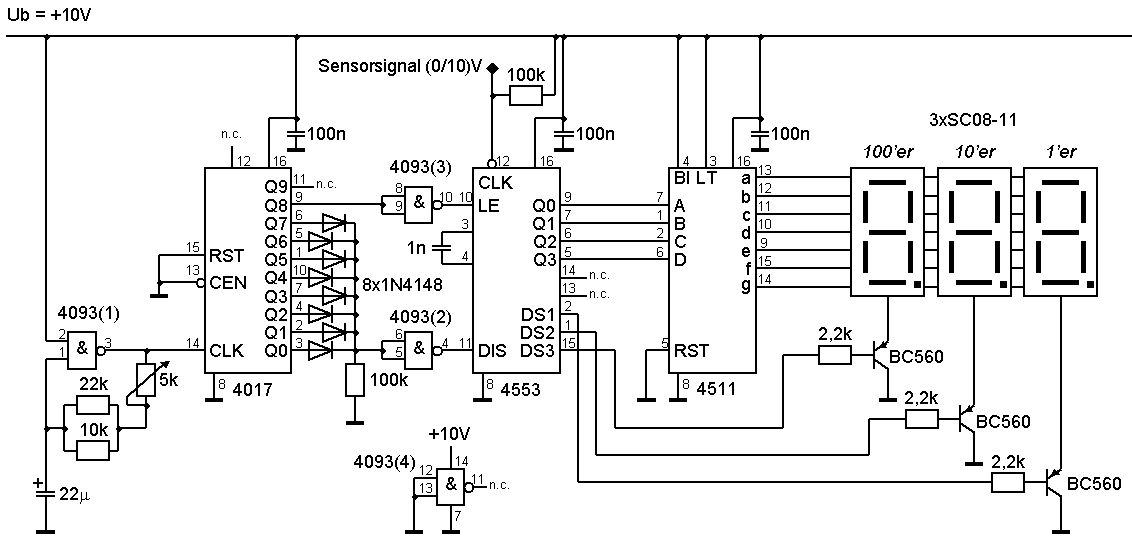

Das 2-Input-NAND-Gatter des Quad-two-input-NAND IC (4093, s.Datenblätter) liegt mit dem Eingang Pin 2 auf +10V, d.h. HIGH. Im Einschaltmoment ist Pin 1 auf LOW, da der Kondensator ungeladen ist und einen Kurzschluss darstellt. Am Ausgang Pin 3 folgt daher nach der NAND-Funktion ein HIGH. Über die Widerstandsschaltung mit dem Poti kann sich der Kondensator laden. Ab einem bestimmten Pegel, der Schaltschwelle des integrierten Schmitt-Triggers für EIN, erkennt das NAND-Gatter an Pin 1 ein HIGH. Daraufhin schaltet der Ausgang nach der Wahrheitstabelle für NAND auf LOW. Im nächsten Schritt entlädt sich der Kondensator über die Widerstände zum Ausgangspin, da dieser 0V zeigt. Die Folge ist nach Unterschreiten der unteren Schaltschwelle ein LOW am Eingangspin 1 des NAND, was wiederum ein HIGH am Ausgang zur Folge hat. Der Zyklus beginnt nun vorn vorne und es entsteht ein Rechtecksignal am Ausgang Pin 3 mit einer Periodendauer von 250ms bei 10V Amplitude, weshalb dieser Schaltungsteil auch als Rechteckgenerator bezeichnet wird. |
|
Der Dezimalzähler (4017, s.Datenblätter) schaltet nach jedem an Pin 14, Clock, einkommenden Impuls ein HIGH-Pegel an seinen Ausgängen Q0 bis Q9 jeweils weiter. Die Steuereingänge Reset (RST, Pin 15) und Clockenable (CEN, Pin 13) sind entsprechend fest verschaltet. Um die geforderte Zählzeit von 2 Sekunden für Sensorimpulse der nachfolgenden Stufe zu schaffen wurde hier eine Diodenmatrix aus acht Dioden eingesetzt. Diese wirken zusammen als ODER-Verknüpfung, d.h. egal, welcher der Pins 2, 3, 4, 7, 10, 1, 5 oder 6 (Q0...Q7) HIGH- Signal zeigt, der zusammengeschlossene Kathodenanschluss der Dioden weist über dem 100kOhm-Widerstand HIGH auf. Aus der Generatorstufe 4.1 wird also die Periodenzeit von 250ms mit 8 mulitpliziert und ergibt die Zählzeit von 2 Sekunden der nächstfolgenden Stufen. An Pin 9 (Ausgang Q8) entsteht beim neunten eingehenden CLK-Signal ein HIGH, welches verwendet wird, um den in Stufe 4.4 erreichten Zählerstand zu speichern. Der IC 4017 hat hier also eine Doppelfunktion, einmal die Erzeugung der TOR-Zeit für die folgende Sensorimpulszählstufe 4.4, und zum zweiten die Funktion einer Ablaufsteuerung der Zählstufe 4.4. |
|
Die zwei eingesetzten NAND-Gatter (2) und (3) des ICs 4093 fungieren durch die zusammengeschlossenen Eingänge jeweils als NICHT-Glied und dienen somit der Signalanpassung, d.h. Invertierung, für die korrekte Funktion der nachfolgenden Stufe 4.4. Die Eingänge des NAND-Gatters (4) sind für die ordnungsgemäße Funktion des ICs 4093 auf definierte Pegel gesetzt, was ein Schwingen des ICs verhindert. |
|
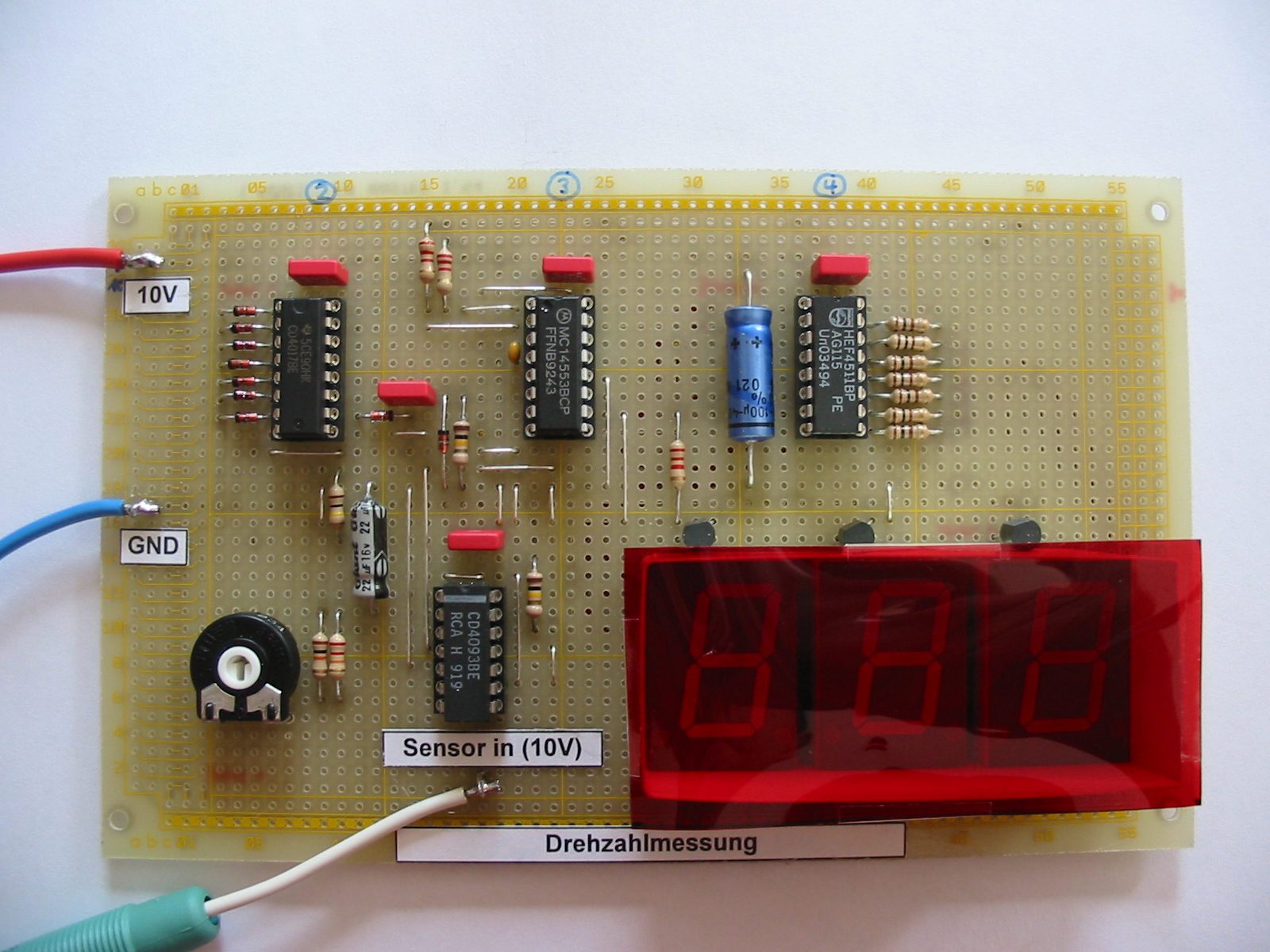
Der BCD (binary coded decimal) Zähler IC (4553, s.Datenblätter) erfüllt zwei Funktionen: Erstens zählt er in drei Dekaden (1'er, 10'er und 100'er) kaskadenweise, d.h. nacheinander von einer Dekade zur nächsten, so dass die Ergebnisse der Zählvorgänge als 1'er, 10'er und 100'er abgegriffen werden können. Zweitens hat der IC eine Speicherfunktion für Ergebnisse, d.h. während ein Ergebnis 'gelatched', d.h. gespeichert, wird, kann ein zweiter, neuer Zählvorgang im Hintergrund vollzogen werden. Die Übernahme des gewünschten neuen Zählerstandes wird durch ein HIGH an Pin 10 (LE - latch enable) hervorgerufen. Dies erklärt die Verwendung des NICHT-Gliedes in Baugruppe 4.3: Solange Q8 (IC 4017) auf LOW ist (für 2,25s), wird durch das NICHT-Glied ein HIGH daraus und somit der Zählerstand über Pin 10 (LE) des 4553 gespeichert. Eintreffende Sensorsignale (Pin 12, CLK) werden solange für Zählvorgänge verarbeitet, wie Pin 11 (DIS - disable clock) auf LOW-Pegel liegt, da es sich um hier um einen lowaktiven Eingang handelt. In diesem Fall wird für zwei Sekunden gezählt. Die Ergebnisse der Zählvorgänge liegen an den Pins 9, 7, 6 und 5 (Q0...Q3) in folgender Weise: Für kurze Zeit liegen die 1'er SIgnale, dann kurz die 10'er und nachfolgend die 100'er Zählergebnisse an. Der Wechsel von 1'er - 10'er - 100'er vollzieht sich laufend, so dass bei der späteren Visualisierung durch die Trägheit des menschlichen Auges der Eindruck entsteht, dass alle Ziffern gleichzeitig leuchten. |
|
Bei dem IC (4511, s.Datenblätter) handelt es sich um einen BCD-/7-Segment Decoder, der über seine interne Logik die anliegenden BCD-Zählersignale (A,B,C und D) in nutzbare Signale zur Visualisierung über sieben Segmente a,b,c,d,e,f und g (Zehnerzahlensystem) wandelt. |
|
Die nacheinander folgende Umschaltung der Siebensegmentanzeigen wird durch die drei Transistoren (BC560, PNP-Typen, s.Datenblätter) erreicht. Sobald die Basis eines Transistors LOW-Signal erhält wird die Emitter-Collectorstrecke niederohmig und die zugehörige Siebensegmentanzeige aktiv geschaltet. Die Steuersignale für die Transistoren stammen aus dem IC 4511 Pin 2, 1 und 15 (DS1, DS2 und DS3). Diese drei Ausgänge sind mit dem Anliegen des entsprechenden Zählerergebnisses für 1'er - 10'er und 100'er synchronisiert, so dass z.B. der Transistor für die 100'er Anzeige mit DS3 angesteuert wird, wenn auch das Ergebnis der 100'er-Zählziffer an Q0 bis Q3 anliegt. Die Segmente einer einzelnen Anzeige (SC08-11, s.Datenblätter) haben einen gemeinsamen Kathodenanschluss, der diese einfache Art der Aktivierung zulässt. Alle drei 2,2kOhm Widerstände begrenzen den maximal fliessenden Transistor-Basisstrom auf ca. 2mA. |
| Komponente | Datenblatt | ||
| Phototransistor | BP103 | ||
| IG-MOS-FET | BUZ11 | ||
| Leistungstransistor | BD139 | ||
| IR-LED | LD242 | ||
| Driver | ULN2803 | ||
| OP - Quad operational amplifier | LM324 | ||
| Counter, decimal | 4017 | ||
| Coder BCD/decimal | 4028 | ||
| Quad-NAND with Schmitt-Trigger | 4093 | ||
| BCD-to-7-segment Latch/Decoder/Driver | 4511 | ||
| Monoflop | 4538 | ||
| BCD-Counter, 3-digit | 4553 | ||
| Zener-diode 4,7V | ZPD4,7 | ||
| Transistor (NPN) | BC550 | ||
| Transistor (PNP) | BC560 | ||
| inductive proximity switch | IG5938 | ||
| Seven-segment display, common cathode | SC08-11 |
 Befehlsaufbau: Out32 Adresse, WertBefehlsbeispiel: Out32 888,12
Befehlsaufbau: Out32 Adresse, WertBefehlsbeispiel: Out32 888,12 | | | |
| | | |
| konfigurieren | LPT2: 632 LPT3: 956 | (LSB) 0011 (MSB) |
Befehlsaufbau: Wert = Inp32 (Adresse)Befehlsbeispiel: Pegel = Inp32 (888) | | | |
| | | |
| an Portpins zuordnen | konfigurieren | LPT2: 632 LPT3: 956 |



| |
{kind=link}
{kind=link}
{kind=link}